ECF(Exception Control Flow)异常控制流#
异常概述#
我们主要处理下面四类异常。其中后三种都属于同步异常,只有Interrupt属于异步异常。
- 硬件中断(Interrupt)。
- 这是来自计算机外部硬件设备的信号。比如你按了一下键盘、移动了鼠标、网卡收到了数据、或者硬盘读完了数据。
- 它跟你程序当前在做什么完全没关系,随时可能发生(异步发生)。且是系统正常工作的一部分,不是错误。
- CPU 会立刻保存当前现场,然后跳转到一个预设的异常处理程序(比如操作系统里管键盘的代码),处理完这个中断(比如记录下你按了哪个键)之后,再返回到原来指令的下一条指令继续执行。
- 陷阱(Traps)。
- 这是程序故意引发的一个异常。目的就是为了向操作系统请求服务。
- 正常的程序只能改变程序状态。比如修改寄存器/内存的值等。如果程序想读一个文件,或输出一些信息,或者调用一个新的程序,或者终止当前进程等,就要通过执行
syscall指令来向内核请求服务。服务完成后,再返回到原来指令的下一条指令继续执行。 - 执行
syscall指令就是一个程序故意设置的到异常处理程序的陷阱。和程序中的call很相似,但是能够提高程序权限。
- 故障(Faults)。
- 故障是由程序错误引起的。它有错误修正处理程序,可能能够被修正。
- 发生故障时,处理器将控制转移到故障处理程序。如果故障可以修正(例如缺页故障,可以通过操作系统拷贝磁盘内存来修正。)则将控制返回到引起故障的指令本身。如果故障不能修正,则终止引起故障的程序。
- 终止(Aborts)。
- 终止是指发生了不可恢复的致命错误。与故障不同,它没有修正程序,而是直接终止。
进程与进程控制(Process and Process control)#
CPU核心的处理器只有一个。那么你是怎么在边看视频的时候后台边跑模型的?
多个程序是怎么样一起执行的?控制权在哪个程序手上?
这些问题都是通过进程来解决的。
进程#
进程的经典定义是一个执行中的过程。操作系统给予进程一种抽象:使得每个进程拥有一个独立的逻辑控制流,以及一个独立的地址空间。
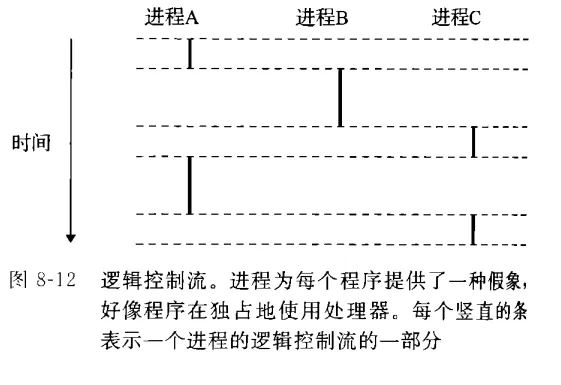
上图是一个运行着三个进程的系统。
从单个进程的角度来看,比如进程A:你会认为它看上去是独占地使用处理器的,只是有时会发生一些停顿。并且你会认为单个进程看上去是独占地使用一块内存地址的,这是因为每个进程都有它自己的私有地址空间,其余的进程不能对这块地址空间进行读写。
但是从系统的角度来看,不同的进程是交错并发执行的。逻辑流在时间上重叠的进程,认为是并发的。例如上图中AB、AC都是并发的,BC不是并发的。
内核模式与用户模式#
一般而言,进程运行在用户模式中。
用户模式中的进程权力很有限,它们不允许进行IO操作,不允许停止处理器,也不允许访问非该进程区域的内存地址。如果它们想要进行这些操作,就需要使用异常控制流来将控制转到内核模式中的异常处理程序。
内核模式中的进程权力很高。它们可以执行任何指令,并且可以访问系统中的任何内存位置。
除了通过异常处理程序响应用户模式中的进程,内核的工作包括通过上下文切换来调度进程。
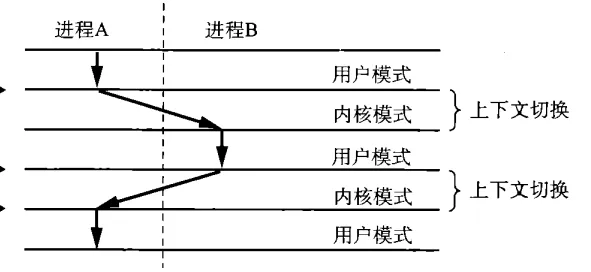
如上图,上下文切换是为了能够合理地进行进程并发。具体地,它会中断当前进程的控制,先保存当前进程的状态(包括寄存器状态,程序计数器状态,栈状态,程序计数器等等),然后切换到另一个进程的状态,最后将控制权转移到另外的进程。
程序中的进程控制#
进程id#
每个进程都有自己的进程ID(PID)。进程ID是一个正整数。C语言中,可以使用getpid函数返回该进程的PID,getppid返回父进程的PID。这两个函数在库<sys/types.h>中。返回值类型是pid_t。
#include <sys/types.h>
#include <stdio.h>
int main()
{
printf("getpid = %d\n" , getpid());
printf("getppid = %d\n" , getppid());
return 0;
}输出:
getpid = 2851
getppid = 1492创建子进程——fork函数#
fork函数不接收参数,返回类型为pid_t。
父进程可以通过fork函数来复制一个子进程。子进程的得到与父进程地址空间相同的一个副本,包括代码,数据,堆,栈,还可以获得父进程所有打开文件的副本。这就意味着父子进程除了pid不同之外,完全相同。
fork函数会在父进程和子进程中都进行一次返回。在父进程中,它返回子进程的PID,在子进程中,它返回0。得到fork函数的返回值是子进程的开始。
下面是一个实例,来说明fork函数的神奇之处。
#include <sys/types.h>
#include <stdio.h>
int main()
{
int x = 1;
pid_t pid_fork = fork();
if(pid_fork == 0)
{
x ++;
printf("child : x = %d\n" , x);
}
else
{
x --;
printf("parent : x = %d\n" , x);
}
printf("pid_fork = %d\n" , pid_fork);
printf("getpid = %d\n" , getpid());
printf("getppid = %d\n" , getppid());
return 0;
}输出:
parent : x = 0
pid_fork = 2771
getpid = 2770
getppid = 1492
child : x = 2
pid_fork = 0
getpid = 2771
getppid = 2770可以看到,父子两个进程都会被执行一次。在我的操作系统(Ubuntu)上,先执行的是父进程。但是这个顺序在不同的操作系统上都会有差异。程序员不应该假设进程执行的顺序。
观察x的信息,可以发现父进程中的x与子进程中的x是相互独立的。在父进程中,x虽然+1,但是它不影响子进程中的x。
子进程的PID是2771。这个数字同时出现在了父进程的pid_fork中。
父进程的PID是2770。这个数字同时出现在了子进程的getppid中。
父进程的getppid是1492。这个PID是我打开的终端的进程。
你可以在终端中输入指令ps来查看进程信息,输出结果:
PID TTY TIME CMD
1492 pts/2 00:00:00 bash
2887 pts/2 00:00:00 ps这个结果的意思是:
第一行:当前终端bash shell的进程ID是1492,运行在2号伪终端上(这是因为我使用的终端是VS code中的终端),累计使用的CPU时间很短(00:00:00)。
第二行也很有意思:第二行说的是进程ps的信息。ps就是我输入的查看进程信息的指令。它的ID是2887,运行在2号伪终端上,基本没占CPU时间(看个进程信息而已嘛,很快的啦)。
你会发现ps和bash也是父子关系。且bash还有一个儿子——就是我们上面运行的C语言程序(但是在输入ps查看进程信息时,那个进程已经被终结了)。
思考:fork函数属不属于异常控制流?属于哪一类?1
思考:下面的程序输出几个Hello World?2
#include <sys/types.h>
#include <stdio.h>
int main()
{
fork();
fork();
printf("Hello World\n");
return 0;
}子进程回收#
进程终止时,不会立即被清除,而是等待被父进程回收。被回收后,内核将子进程的退出状态传递给父进程,然后清除子进程。
一个中止但没有被回收的进程叫做僵尸进程(zombie,死而不僵)。
如果父进程终止了,内核会安排一个特殊的进程init作为父进程的所有未清除的子进程的父亲。init进程的PID是1,是进程树的根节点。
等待子进程终止——waitpid函数#
waitpid函数的定义如下:
include<wait.h>
include<sys/types.h>
pid_t waitpid(pid_t pid, int *statusp, int options)这个函数基本是等待一些子进程的终止。视参数的不同有多种不同的行为。
等待集#
- 如果pid不为-1,则等待集是pid对应的进程。这个进程必须是当前进程的子进程。
- 如果pid为-1,则等待集是当前进程的所有子进程。
若pid为-1但是当前进程没有子进程,或者pid不为-1但是不合法,则直接返回-1,并设置errno为ECHILD。
函数行为#
- options = 0,执行默认行为。默认行为是挂起当前进程直到等待集中有进程终止。返回这个终止进程的pid。
- options = WNOHANG,则执行不挂起行为。无论如何,函数都立即返回。如果等待集中没有进程终止,则返回0;否则返回终止的PID。
- options = WUNTRACED,则不但监控终止行为,还检测停止行为。即等待集中的子进程被终止或者中断,都会引起返回。
- options = WCONTINUED,监测等待集中的终止行为或者中断后重新执行的行为。即等待集中的子进程被终止或者被中断后收到信号SIGCONT重新执行,都会引起返回。
- 可以用或运算符组合这些选项。如options = WNOHANG | WUNTRACED,行为是监测停止和中断,且如2所示,立即返回。
如果waitpid函数检测到了终止行为,则会自动将终止的进程回收掉。
返回额外信息:#
该函数会将导致返回的子进程的信息传递到statusp指针中。
设status = *statusp,则我们有下面几个宏来通过status得到子进程信息:
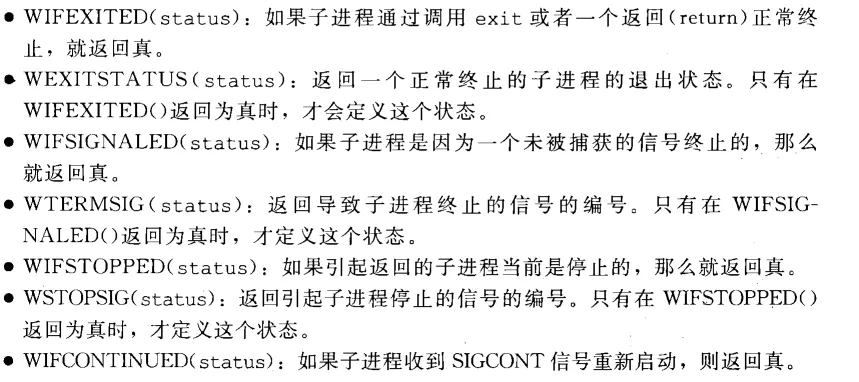
请注意,这些宏的使用方式是和operations参数的选取对应的。你只有监测了子进程的Stop行为,访问WIFSTOPPED才有意义。
几个栗子#
举几个例子,来帮助理解waitpid函数。
先来看书上的例子,使用该函数的默认行为。
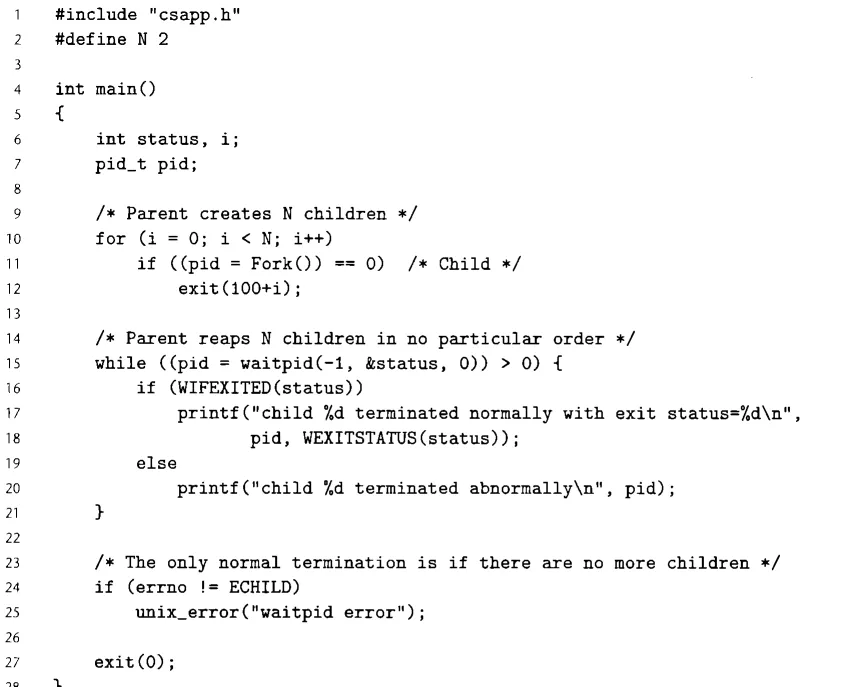
这段代码创建了N个子进程,每个在创建时即退出,返回码为100+i。
while循环中,每次循环等待一个子进程结束。if语句确保正常返回后,输出信息。
最终确保原进程没有其余子进程(因为在waitpid监测时,自动会将导致返回的终止的子进程回收。)
程序正常退出。
再来看一个算法界的段子——睡眠排序。
所谓睡眠排序就是说,对于一个n元正int数组,我需要排序。我创建n个进程,第i个进程去sleep a[i]秒。
因为一秒的差异对于计算机来说是很大的,所以我们可以认为进程是按照睡眠时长从小到大醒来的。
然后我监测进程醒来的顺序,就可以得到排序结果。3
这个代码和上面的代码核心逻辑差不多。
#include <stdio.h>
#include <unistd.h>
#include <signal.h>
#include <stdlib.h>
#include <wait.h>
int a[5];
int n = 5;
int main()
{
for(int i = 0; i < n; i++)
{
scanf("%d" , &a[i]);
}
for(int i = 0; i < n; i++)
{
pid_t pid = fork();
if(pid == 0)
{
sleep(a[i]);
exit(a[i]);
}
}
int status;
while(waitpid(-1 , &status , 0) > 0)
{
if(WIFEXITED(status))
{
printf("%d\n" , WEXITSTATUS(status));
}
}
return 0;
}再举一个例子,来看看选项WNOHANG的用处。
#include <sys/wait.h>
#include <unistd.h>
#include <stdio.h>
int main() {
pid_t pid = fork();
if (pid == 0) {
// 子进程
sleep(2);
printf("Child process exiting\n");
return 0;
} else {
// 父进程
int status;
pid_t result;
while (1) {
result = waitpid(pid, &status, WNOHANG);
if (result == 0) {
printf("Child still running, doing other work...\n");
sleep(1);
} else if (result == pid) {
printf("Child exited\n");
break;
} else {
perror("waitpid");
break;
}
}
}
return 0;
}这个代码中使用while循环每次等待子进程的返回。如果子进程没有返回,则父进程能够在循环中继续干别的事情,而不是在那干等着。
加载并创建新的程序——execve函数#

execve函数接受一个可执行文件的文件名,一个参数列表和一个环境变量列表。然后以指定的参数和环境变量,去运行对应的可执行文件。
可想而知,execve最常见的使用场景是shell。在Shell Lab中,这个尤其得到明显的体现。
信号#
信号是由内核发送给进程的信息。
信号的发射#
信号的发射是基于进程组概念实现的。进程组和pid差不多,也由一个进程组ID代表。
子进程和父进程默认在同个进程组中。但是进程也可以改变自己或者子进程所属的进程组,也可以创建一个只包含自己的新的进程组。
下面是一些例子:
-
输入Ctrl+C会发射SIGINT(键盘中断)给当前的前台进程组。
-
使用 /bin/kill -9 x会发送信号9(SIGKILL,杀死程序)给进程x。
-
使用 /bin/kill -9 -x会发送信号9(SIGKILL)给进程组x。
-
C语言中可以使用kill函数来给其他进程发送信号。
- 如果pid > 0,则发送信号码sig给进程pid。
- 如果pid = 0,则发送信号给进程组中的所有进程,包括自己。
- 如果pid < 0,则发送信号给进程组-pid中的所有进程。
#include <sys/types.h>
#include <signal.h>
int kill(pid_t pid , int sig)附,段子一则:

(退役杀手当邮差.jpg)
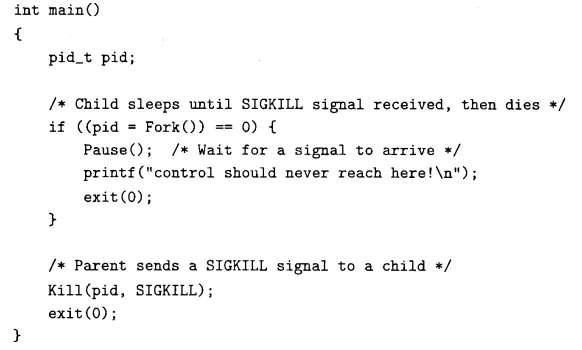
例如下面的代码中,父进程发送kill信号给子进程。
你可以使用ps命令查看终端的pid,然后写个C代码把终端杀了……
然后你甚至还可以写出这种代码:
//killer_without_emotions.c
#include<signal.h>
#include<sys/types.h>
#include<stdio.h>
#include<unistd.h>
#include<stdlib.h>
int main()
{
pid_t pid = getpid();
for(int i = 1; ; i++)
{
if(i == pid)
{
continue;
}
kill(i , SIGKILL);
}
kill(pid , SIGKILL);
exit(0);
}注意,千万不要在你的主系统中运行这个程序!
我尝试作死,在wsl中运行,导致wsl直接崩溃。好在windows主系统的进程和wsl是分开的,电脑没有蓝屏,然后wsl仍然可以重启。
接受信号#
进程接收信号后,会采取一些行为。信号的默认行为见图所示。
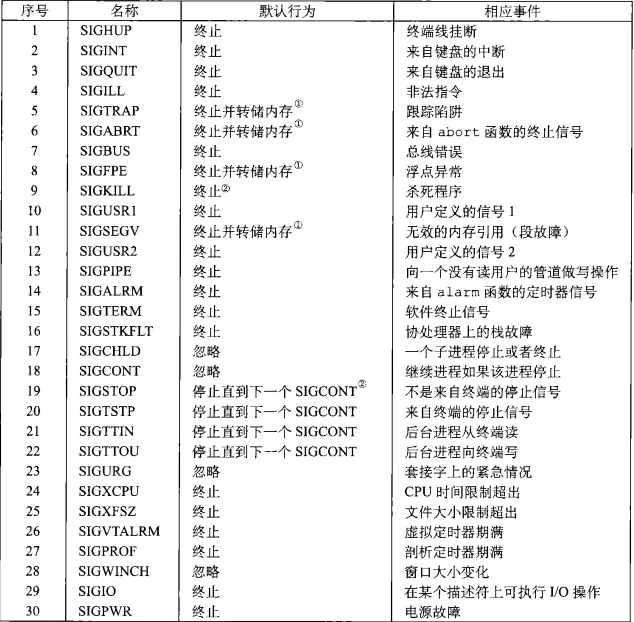
进程可以通过signal函数修改默认行为。但是SIGSTOP与SIGKILL的行为不能修改。

这个函数修改与信号signum相关的行为。
- 如果handler是
SIG_IGN,那么会将默认行为改成忽略。 - 如果是
SIG_DFL,那么会将行为恢复为默认。 - 否则handler传递一个用户定义的函数地址。只要进程接到这个信号,就会调用这个函数。这就是设置信号处理程序。
下面的例子写了一个信号处理函数,来处理ctrl+C传出的SIGINT信号。注意函数sigint_handler接受一个参数sig,是引起它的信号。
#include<signal.h>
#include<sys/types.h>
#include<stdio.h>
#include<unistd.h>
#include<stdlib.h>
void sigint_handler(int sig)
{
printf("Received signal: %d\n", sig);
printf("So you want to stop me?\n");
printf("Well……\n");
printf("OK :)\n");
exit(0);
}
int main()
{
signal(SIGINT , sigint_handler);
pause();
exit(0);
}信号处理函数在执行过程中,也有可能因为接收到其它信号而被其它信号处理函数打断。
但是它不会被同类信号打断。举个例子:如果上面的信号处理函数是sleep 3秒,我在这三秒中再按一次ctrl+C,不会再跳进一次信号处理函数而重置sleep时间,而是默认已经接收这个信号,将信号状态设置为待处理。
信号阻塞与解阻塞#
程序可以使用sigprocmask等函数,阻塞和解阻塞选定的信号。
被阻塞的信号不会被接收。
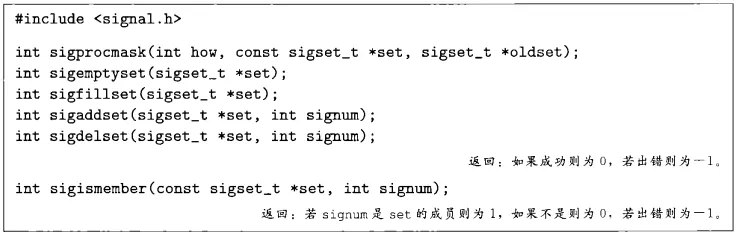
sigprocmask行为如下:
- 当
how = SIG_BLOCK时,会将set中的信号添加到blocked中。 - 当
how = SIG_UNBLOCK时,会从blocked中删除set中的信号。 - 当
how = SETMASK时,会将blocked直接设置为set.
如果oldset非空,那么该函数会将之前的blocked保存在oldset中。
举个例子,下面的程序会阻塞SIGINT信号,保证在sleep的时候不被keyboard打扰怎么听起来怪怪的()
#include<signal.h>
#include<sys/types.h>
#include<stdio.h>
#include<unistd.h>
#include<stdlib.h>
int main()
{
sigset_t mask , prev;
sigemptyset(&mask);
sigaddset(&mask , SIGINT);
sigprocmask(SIG_BLOCK , &mask , &prev);
sleep(10);
printf("first sleep OK!\n");
sigprocmask(SIG_SETMASK , &prev , NULL);
sleep(10);
return 0;
}请注意,如果在前10秒输入了Ctrl+C,在接触阻塞的一瞬间,程序就会结束。因为阻塞信号不等于将信号忽略,而只是屯着不处理。